

 I probably shouldn’t admit this, but some features that come with the latest electronic flight instruments have left me a little, um, disinterested. Until I try them, that is. A good example is the concept of “safe glide” or even autoland. Garmin introduced both concepts a few years ago, though the full-autoland idea is more recent and limited to high-end aircraft where the system can control the engine directly. That’s not at my pay grade.
I probably shouldn’t admit this, but some features that come with the latest electronic flight instruments have left me a little, um, disinterested. Until I try them, that is. A good example is the concept of “safe glide” or even autoland. Garmin introduced both concepts a few years ago, though the full-autoland idea is more recent and limited to high-end aircraft where the system can control the engine directly. That’s not at my pay grade.
The more common version is what Garmin calls Smart Glide and, more recently, Dynon rolled out what it calls Emergency Glide. They work similarly: When commanded, they set up a controlled descent to the nearest viable airport and let the pilot concentrate on other things. To be honest, I was a bit meh about them as safety features. After all, you’re trained to set the airplane up for best-glide speed as soon as you recognize a power failure and all good pilots fly along considering which airports beneath them are reachable. Things like terrain-aware glide rings on MFDs and EFBs take much of the guessing out of that.
So I was skeptical until I flew with the Dynon version in my own airplane. To get this new functionality in the Dynon universe, you need to be running at least a Dynon HDX system—it is not offered for the Classic or Touch models—or one of the later AFS systems. You need a two-axis Dynon or AFS autopilot. There are a few other requirements, including an up-to-date database and the airplane’s best-glide speed entered into the setup menu. Moreover, you have to have the autopilot’s “expert” mode enabled; but this is what most do and there’s no cost involved, just a setting.
Let’s Try It
Updating the software took but a few minutes and it didn’t break a thing—early success! In fact, there’s no outward indication you have the extra features. Until, that is, you press and hold the NRST key. Doing so brings up a notification on the primary flight display: HOLD TO ENABLE EMERGENCY GLIDE. Continue holding and the mode engages. The first thing it does is engage the autopilot in pitch and roll regardless of the previous autopilot mode. Then it syncs the indicated airspeed (IAS) bug with the preprogrammed best-glide speed and sets the AP to hold that value. Depending on how much power you still have available and your current speed, the autopilot might well pitch up to capture IAS hold but in my experience it does so gradually. Once captured, the AP will hold this IAS value plus or minus about 3 knots. (This could be an artifact of how my system is configured and/or the airplane’s responses.)

Once activated, Dynon’s Emergency Glide system tells the pilot it’s active right in the PFD section of the screen. You can’t miss it.
So that’s pitch, and it’s the right way to go—quickly getting the airplane to its best-glide speed and holding it there while you troubleshoot. If that’s all the system did, it would be valuable as a way to manage energy and relieve the pilot of some workload.
Of course, this was the easy part of the programming. Much harder is calculating where the airplane might end up. Dynon’s approach is reasonably conservative. It needs to see an airport within the predicted glide circle that’s reachable given the existing winds and not blocked by terrain. This last feature depends on a 1000-foot buffer and worked well in my tests. Emergency Glide will not point you at a nearer airport if there’s terrain in the way. Two outcomes are possible once you engage Emergency Glide. Either the system sees a viable airport or it doesn’t. In the second case, you get a NO VALID AIRPORT annunciation and the autopilot defaults to a track lateral mode that syncs with the current heading when Emergency Glide is enabled.

If there are no airports in range, the Emergency Glide system warns the pilot and engages a track-hold feature on the last heading.
Head This Way
For airports within range, the system sets the candidate as a direct-to waypoint, the autopilot to GPS NAV, calculates a desired vertical profile to the target and sets the altitude bug for field elevation. Moreover, if you have a Dynon or AFS com radio, the feature will pre-program the needed frequencies. In my case, with the Dynon HDX talking to a Garmin GTR 200, it loads the target airport’s UNICOM or tower frequency into the standby slot. All of this takes but a few seconds, giving the pilot a chance to begin troubleshooting while the airplane is headed in a good general direction at a speed that prolongs the descent.

When you’re close to the airport, Emergency Glide prompts you to take control.
Let’s say you have not discovered a tank run dry or some other fixable reason the engine went quiet. The Emergency Glide feature keeps doing its thing. If you have altitude to spare, about a minute before reaching the airport, the system will annunciate NEARING AIRPORT TAKE CONTROL. It doesn’t kick the autopilot off at this point but is warning you that you’re close—time for the pilot to set up for the landing. If you arrive with altitude to spare and have crossed the midpoint of the airport, Emergency Glide will change to CIRCLING APT mode, which is simply a 20° left turn. Dynon notes that because this is a roll-only mode it’s no longer taking wind into account so you could drift away from the airport.
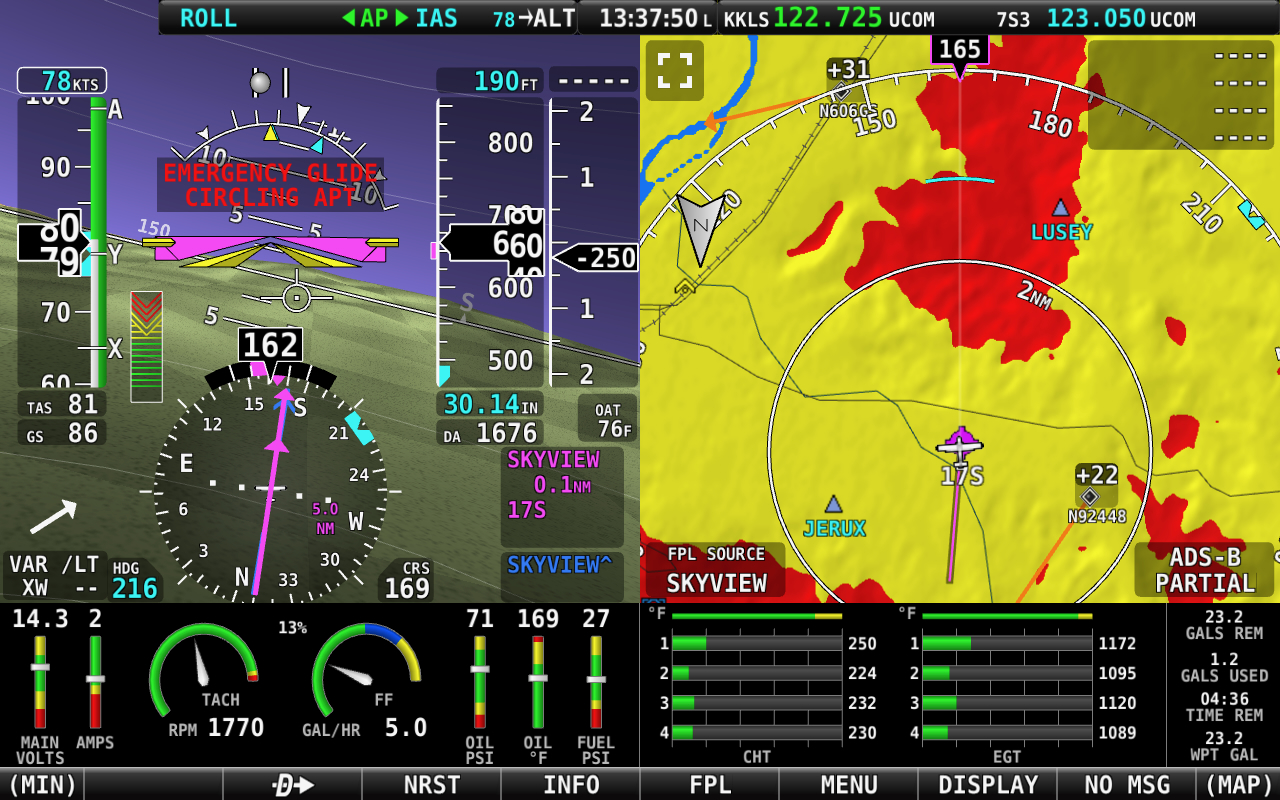
If you get to the target airport with altitude to spare, Emergency Glide will set up a 20-degree left turn around the runway for you. It does not account for wind, though.
Should the airport originally designated become untenable—perhaps the winds have changed or atmospheric conditions have created more sink—Emergency Glide will return to track-only mode with IAS hold. It’s clearly annunciated on the PFD but it’s worth understanding that it could change modes on you.
These are all worthy goals but what the Dynon system can’t do—and the company is explicit that it doesn’t—are advanced functions like lining up for a particular runway or even committing the landing. The pilot remains on the hook for configuration control and the hopefully successful touchdown. But there’s little doubt that Emergency Glide is a valuable tool to give the pilot some breathing room to troubleshoot in the air and have the controlled descent handled by the EFIS. The altitude saved or energy preserved by quick actions of the Emergency Glide feature could make the difference between getting back to a runway or putting it down somewhere a lot less hospitable.
I have an AFS 5600 EDFIS and a Dynon AP. Is this “modern enough” to work?
Yes.
Seems like this could be useful for VFR into IFR conditions as well…”get me on the ground now, please”. Granted, you’ve already got a working autopilot so the danger is lessened than true “pilot controlled vfr into ifr”, but still…